当船只在大海中飞行时,一般使用主动舵体系改动舵角从而使船只沿着希望的航迹主动飞行[1]。主动舵体系是根据航迹差错信息主动完结操作舵机的设备,是在随动操舵基础上发展起来的一种操舵方法。它能替代人工操舵,坚持船只在设定航向或预订航迹上飞行,完成航向坚持、航向改动以及航迹坚持的功用。主动舵不光能够减轻梢公的劳动强度,并且在远航时,在相同的飞行条件下,能够大大削减偏航次数,减小航向差错,来进步航速,缩短飞行时刻,节约燃料,进步飞行的经济效益[2,3]。
航迹操控分为直接航迹操控和直接航迹操控。直接航迹操控是根据航迹差错直接改动舵角,从而使船只的实践航迹能够盯梢希望航迹。直接航迹操控是经过航迹差错核算希望的航向信息,再使用希望的航向与实践船只航向的差错改动舵角,以此来完成航迹操控。
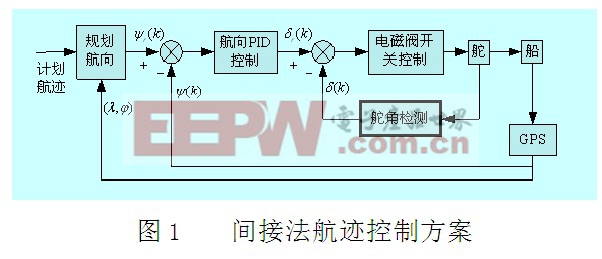
本文选用直接航迹操控方法,如图1所示,内环为船的舵角操控,用于操作舵机使实践舵角与规划舵角共同,从而使船只航向发生改动,中环为船的航向操控,是将GPS丈量的当时船只航向与航向规划器发生的希望航向相比较,航向差错送入航向PID操控器,由此发生希望的舵角改变值,外环为船只的航迹操控,经过航迹盯梢算法核算能够消除航迹差错的规划航向。
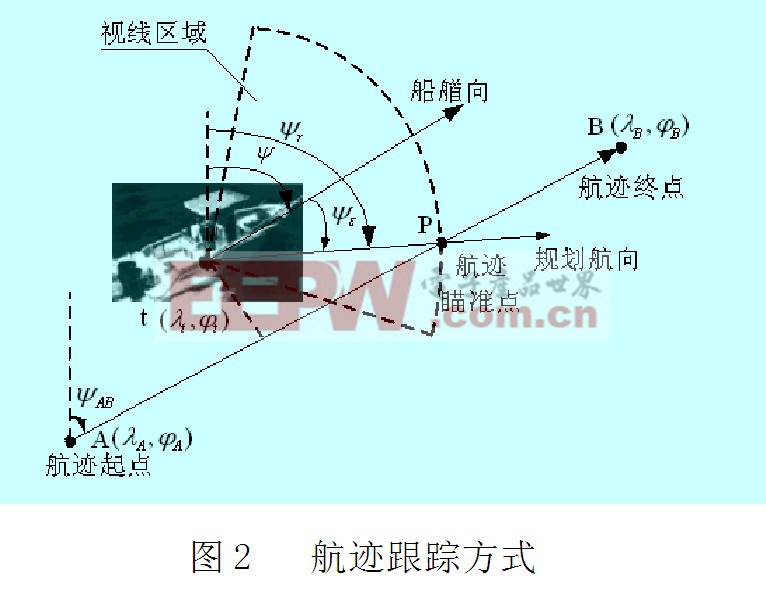
船只在飞行过程中遭到风、浪及海流等要素的影响,呈现航迹差错问题。本文经过GPS体系获取的船只实践方位信息对航迹差错进行解算,以获取可消除航迹差错的航向批改视点。图2所示为航迹盯梢方法原理图。人工驾驭时,船只驾驭人员会在必定的视野区域实时调查船只前方有无障碍物和是否违背希望的航迹。因此在时,模仿人工驾驭设定视野扫描区域,当航迹差错在一些规模时,视野扫描区域与预订航迹相交于航迹瞄准点P。当时船位与航迹瞄准点P构成的航迹瞄准方向即为经视野导航战略导出的规划航向视点
。使用GPS体系反应的船只方位、航向信息以及设定的航迹信息可核算出当时的规划航向视点
因为航迹瞄准点P在方案航向AB上,所以用AP点、PB点核算出的航向视点与方案航向相同。
经视野扶引战略解算出的规划航向角将传递到航向操控办理体系中。经过对船只的航向操控使船只按规划航向视点方向行进,从而使船只相对于预订航线的差错逐步趋向零。该盯梢规则能够使船只在迫临预订航线缩短航迹差错的一起,使得船只航向视点趋近于预订航线的航向角。

